
robotics-university.com | Robot-1 menggunakan komparator/Opamp sebagai pembanding sinyal masukan (aktual) dari sensor optik (detektor garis) dan sinyal referensi untuk menghasilkan sinyal keluaran yang langsung diumpankan kepada driver motor DC (H-bridge dalam IC L298). Hal ini berarti robot-1 memanfaatkan komparator sebagai pendeteksi sinyal masukan sensor dan sekaligus sebagai pembangkit sinyal kendali (keluaran) putaran motor DC yang merupakan piranti penggerak/aktuator robot-1. Dengan begitu dapat dikatakan bahwa piranti cerdas dari robot-1 adalah komparator (OpAmp).
Gambar 1. Skematik elektronik pengendali robot-1
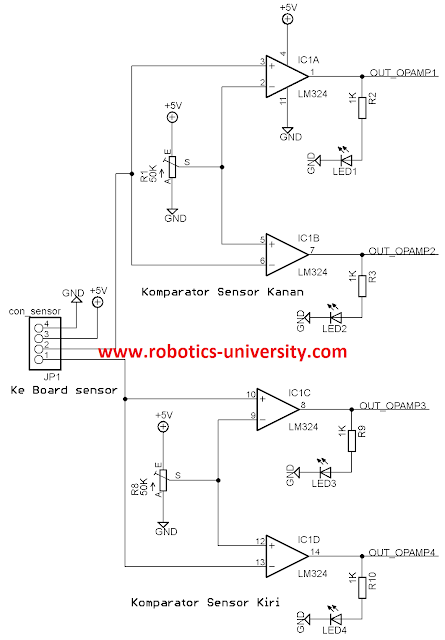
Dalam pembuatan robot-1, kita hanya membutuhkan dua buah sensor. Sebuah sensor diletakkan pada sisi kanan garis pandu dan sebuah sensor diletakkan pada sisi kiri garis pandu. Sebuah sensor akan menghasilkan sinyal masukan untuk dua buah OpAmp IC1A dan IC1B (IC LM324). Sinyal masukan tersebut dilewatkan pada kanal yang berbeda untuk masing-masing OpAmp, yaitu pada OpAmp IC1A sinyal masukan dilewatkan pada kanal noninverting (+) sedangkan pada OpAmp IC1B sinyal masukan dilewatkan pada kanal inverting (-). Hal ini juga diberlakukan pada sinyal tegangan referensi. Sinyal tegangan referensi +5 volt diatur menggunakan potensiometer R1 (50KΩ) dengan sinyal keluaran potensiometer dimasukkan pada dua kanal OpAmp secara berlawanan. Pada IC1A tegangan referensi dilewatkan pada kanal inverting (-) sedang pada IC1B tegangan referensi dilewatkan pada kanal noninverting (+). Oleh sebab kita menggunakan dua buah OpAmp maka jumlah jalur keluarannya pun juga dua buah, yaitu jalur keluaran OUTPUT_OPAMP1 dan jalur keluaran OUTPUT_OPAMP2. Lihat gambar 2!

Gambar 2. Komparator sensor & pengendali robot-1
Nilai/logika sinyal keluaran OpAmp IC1A dan IC1B akan selalu berbeda. Jika keluaran OpAmp IC1A bernilai high (1) maka OpAmp IC1B akan bernilai low, demikian sebaliknya. Hal ini terjadi karena sinyal masukan yang dihasilkan sensor dan sinyal tengan referensi dilewatkan pada kanal yang berbeda. Perbedaan sinyal keluaran OpAmp (antara jalur OUTPUT_OPAMP1 dengan jalur OUTPUT_OPAMP2) inilah yang akan menjadikan driver motor H-bridge dalam IC L298 dapat mengendalikan putaran motor DC secara dua arah, yaitu searah jarum jam (CW) atau berlawanan arah jarum jam (CCW).
0 comments:
Post a Comment